Грузовые автомобили MAN ZDR-KSM. Руководство — часть 7
6.3
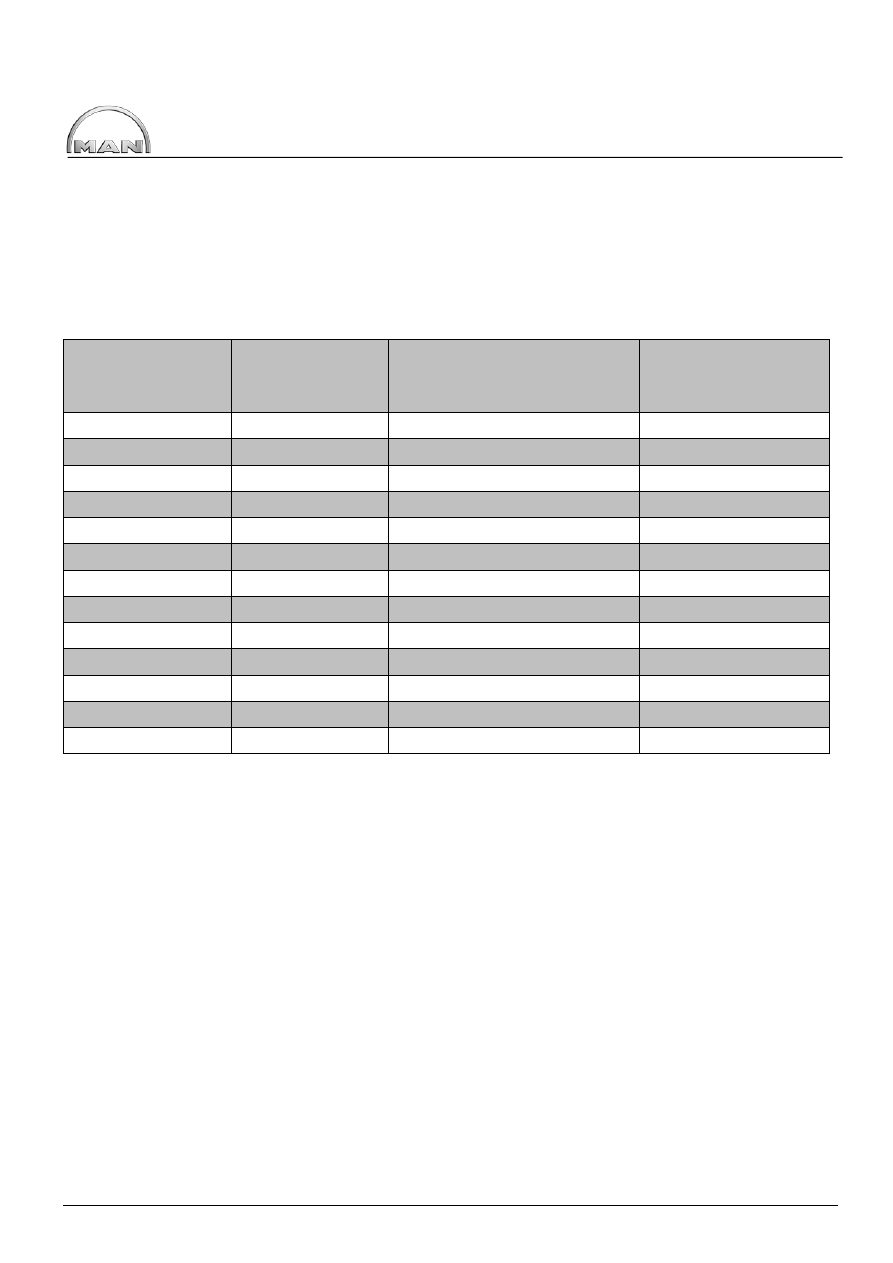
Передаваемые на шину A-CAN данные о состоянии компонентов автомобиля
6.3.1
Возможные сообщения, передаваемые на шину A-CAN
В зависимости от исполнения автомобиля и настройки KSM посредством шины A-CAN электроника
надстройки может получать следующие данные:
Сообщения,
передаваемые на шину
A-CAN
KSM с функцией
управления
надстройкой (FUP:
81.25890-2202)
KSM с интерфейсом FMS 1.0 и
функцией управления надстройкой
(FUP: 81.25890-2202 + 81.25890-
1111)
KSM с интерфейсом FMS
1.0 без функции
управления надстройкой
(FUP: 81.25890-1111)
ETC1
X
X
ETC2
X
X
ETC3
X
X
EBC1
X
X
Amb_Cond
X
X
Aux_Stat_ZBR1
X
X
ECAM1
X
X
Time_date
X
X
EngFlui_LevPressure
X
X
ERC1_Rx
X
X
ERC1_RD/ERC1_RE
Fuel_ECO
X
X
Aux_Stat_KSM1
X
X
Примечания:
x =
сообщение направляется на шину A-CAN
Жирный шрифт = выделены сообщения, включённые в содержащиеся в «FMS-standard interface»
(интерфейс управления парком транспортных средств). Сообщение ERC1_RE направляется только в том
случае, когда установлен первичный тормоз-замедлитель, сообщение ERC1_RD - только в случае, когда
установлен вторичный тормоз-замедлитель.
Сигналы, которые могут быть отправлены по шине CAN, приведены
в главе 6.5.
Внимание!
Блок KSM с функциональными параметрами 81.25816.1111 (FMS без функций управления надстройкой)
предоставляет только интерфейс FMS, который не наделён функциями обычного интерфейса блока KSM
(выдача управляющих сигналов, воздействие на режимы работы двигателя - ограничение оборотов,
крутящего момента и т. д.)!
26
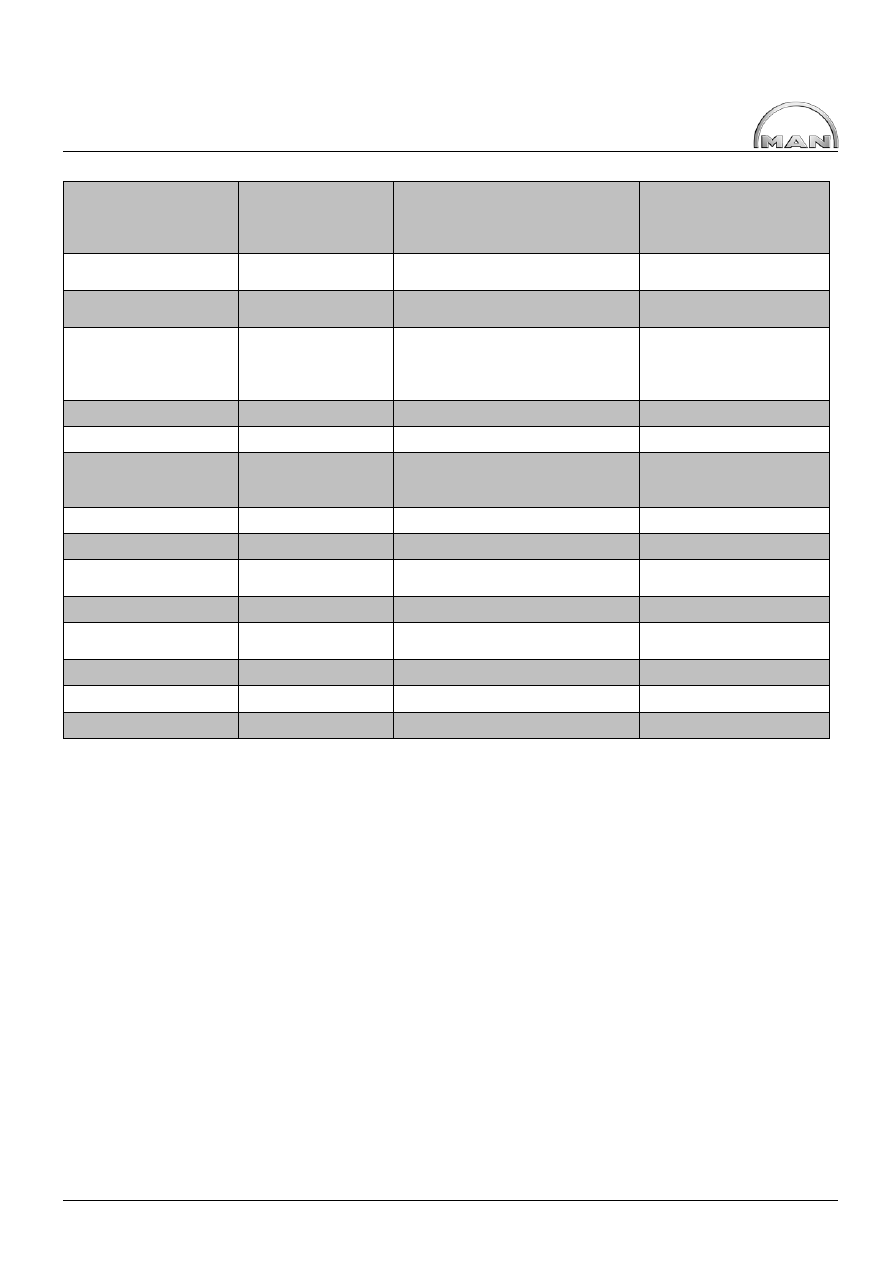
Сообщения,
передаваемые на шину
A-CAN
KSM с функцией
управления
надстройкой (FUP:
81.25890-2202)
KSM с интерфейсом FMS 1.0 и
функцией управления
надстройкой (FUP: 81.25890-2202
+ 81.25890-1111)
KSM с интерфейсом FMS
1.0 без функции
управления надстройкой
(FUP: 81.25890-1111)
Veh_distance
(пробег
автомобиля)
X
X
X
Veh_weight EBS/ECAS
(нагрузки на оси)
X
X
X
Eng_hours, Revolution
(моточасы, количество
оборотов коленчатого
вала двигателя)
X
X
X
TCO1
X
X
X
CCSV
X
X
X
Eng_Temp
(температура
двигателя)
X
X
X
EEC1
X
X
X
EEC2
X
X
X
Fuel_consumption
(расход топлива)
X
X
FMS_SW_Identification
X
X
Dash_display
(дисплей
комбинации приборов)
X
X
Service
X
X
BAM_MTCO_VIN
X
X
P_MTCO_VIN
X
X
Примечания:
x = Сообщение направляется по шине A-CAN
x =
сообщение направляется на шину A-CAN
Жирный шрифт = выделены сообщения, включённые в содержащиеся в «FMS-standard interface»
(интерфейс управления парком транспортных средств). Сообщение ERC1_RE направляется только в том
случае, когда установлен первичный тормоз-замедлитель, сообщение ERC1_RD - только в случае, когда
установлен вторичный тормоз-замедлитель.
Сигналы, которые могут быть отправлены по шине CAN, приведены
в главе 6.5.
Внимание!
Блок KSM с функциональными параметрами 81.25816.1111 (FMS без функций управления надстройкой)
предоставляет только интерфейс FMS, который не наделён функциями обычного интерфейса блока KSM
(выдача управляющих сигналов, воздействие на режимы работы двигателя - ограничение оборотов,
крутящего момента и т. д.)!
27
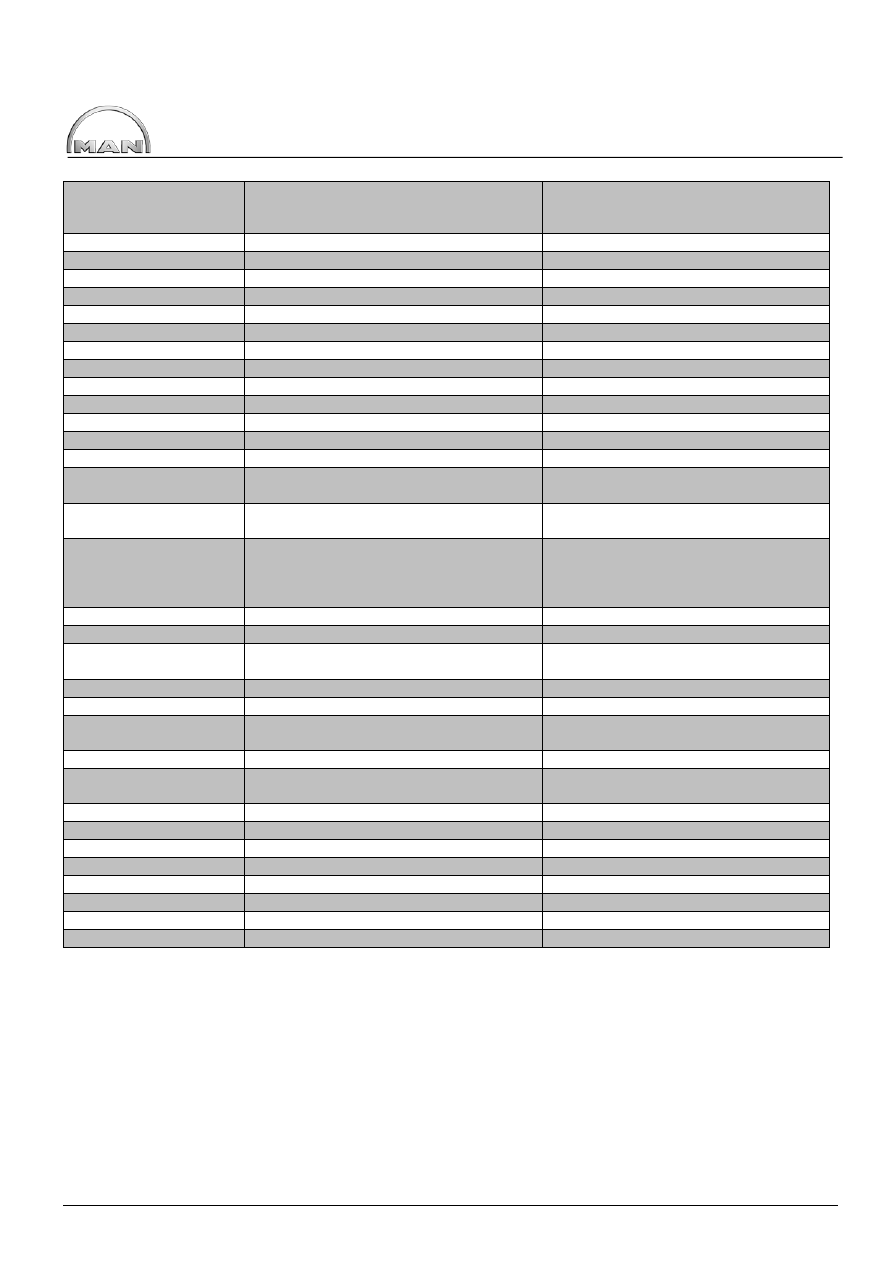
Сообщения,
передаваемые на шину
A-CAN
KSM с интерфейсом FMS 2.0 и функцией
управления надстройкой (FUP: 81.25890-
3063 + 81.25890-2202)
KSM с интерфейсом FMS 2.0 без
функции управления надстройкой (FUP:
81.25890.3063)
ETC1
X
ETC2
X
ETC3
X
EBC1
X
Amb_Cond
X
X
Aux_Stat_ZBR1
X
ECAM1
X
Time_date
X
EngFlui_LevPressure
X
ERC1_Rx
X
ERC1_RD/ERC1_RE
Fuel_ECO
X
X
Aux_Stat_KSM1
X
Veh_distance
(пробег
автомобиля)
X
X
Veh_weight EBS/ECAS
(нагрузки на оси)
X
X
Eng_hours, Revolution
(моточасы, количество
оборотов коленчатого
вала двигателя)
X
X
TCO1
X
X
CCVS
X
X
Eng_Temp
(температура
двигателя)
X
X
EEC1
X
X
EEC2
X
X
Fuel_consumption
(расход топлива)
X
X
FMS_SW_Identification
X
X
Dash_display
(дисплей
комбинации приборов)
X
X
Service
X
X
BAM_MTCO_VIN
X
X
P_MTCO_VIN
X
X
HRFC HiResFuelCons.
X (с Евро-6)
X (с Евро-6)
DI Driver Identification
X
X
BAM Driver ID
X
X
P Driver ID
X
X
tankInformation1
X
X
Примечания:
x =
сообщение направляется на шину A-CAN.
Жирным шрифтом = выделены сообщения, включённые в содержащиеся в «FMS-standard interface»
(интерфейс управления парком транспортных средств). Сообщение ERC1_RE направляется только в том
случае, когда установлен первичный тормоз-замедлитель, сообщение ERC1_RD - только в случае, когда
установлен вторичный тормоз-замедлитель.
= Дополнительные сообщения, направляемые на шину A-CAN, начиная с версии FMS 2.0
Сигналы, которые могут быть отправлены по шине CAN, приведены
в главе 6.5.
28

Внимание!
Блок KSM с функциональными параметрами 81.25816.-3063 предоставляет только интерфейс FMS,
который не наделён функциями обычного интерфейса блока KSM (выдача управляющих сигналов,
воздействие на режимы работы двигателя - ограничение оборотов, крутящего момента и т. д.)!
29
Нет комментариевНе стесняйтесь поделиться с нами вашим ценным мнением.
Текст